

我使用新的Nutanix Playbooks在AWS中制作了一个简短的视频。剧本提供了一种视觉方式,可以在混合云中自动化动作。由于制作视频简而言之,我没有花很多时间谈论您可以设定的选项。
Prism Central有很多警报,您可以用来触发您要采取的动作。如果您看不到正确的“警报”,则可以自定义现有的“警报”以满足您的需求,并将成为用户定义的警报。在我的示例中,我在添加节点时使用了超过80%的容量的关键记忆容量。如果您的群集通常高于10个节点,则可能尝试根据一个节点使用较高百分比,将是整体内存的较低百分比。同样,选择较低的内存百分比可能会更具侵略性。您还需要设置的一件事是“如果条件持续存在”。我没有设置它,以便我可以轻松录制演示。这将为您提供短暂的爆发。
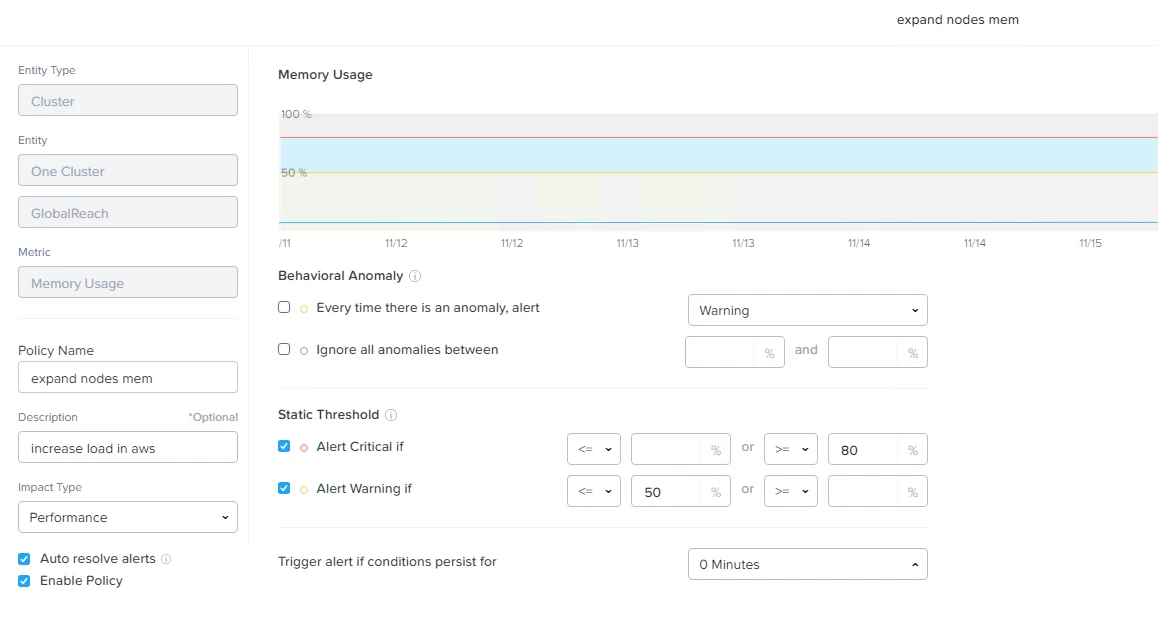
当您进行配置时,如果其他语句触发了警报是否关键,或者是从自定义定义的警报中触发警告,则可以执行此操作。
值得注意的是,警告或关键的拼写需要小写才能使其起作用。
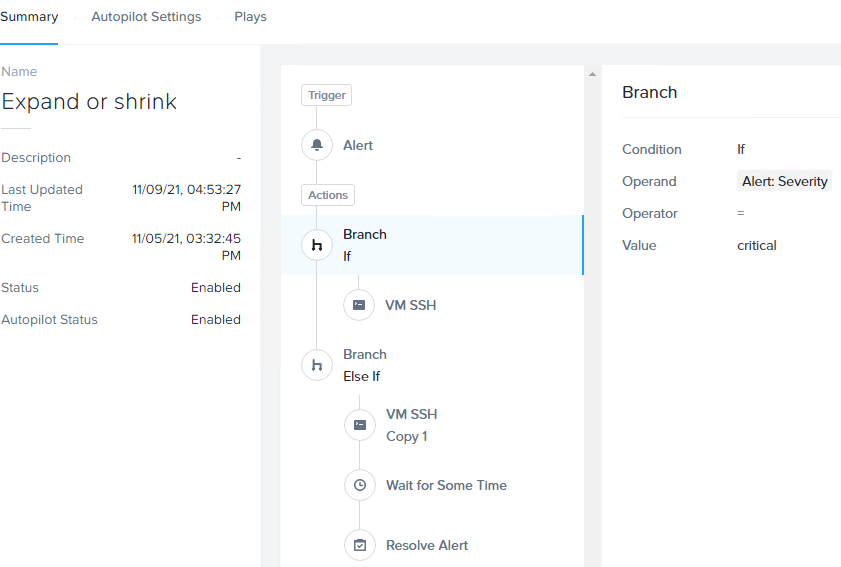
一旦触发了关键工作流程,它将开始向群集添加一个节点。而不是在群集中添加节点并解决一个警报,而是使用AutoPilot来跟踪内存使用情况,以防我们需要添加更多节点。除非解决警报,否则剧本不会在同一警报上再次触发。使用自动驾驶仪,我们可以让它继续检查我们的状态。今天,使用剧本,您只能在每个剧本中拥有一套自动驾驶仪。我们正在根据警告批判性删除节点。通过删除,我们确实在Python脚本制作API之后确实解决了警报。完成一次后,我们将能够再次提醒触发器,从而导致更多节点被删除。
我在下面添加了脚本。还有其他一些博客文章使用类似的脚本可以帮助您浏览这些脚本。删除节点脚本基本上与添加脚本相同,但还检查集群中至少有3个节点。
如果您还有其他问题,请开火!还有更多的编码示例https://www.nutanix.dev/

